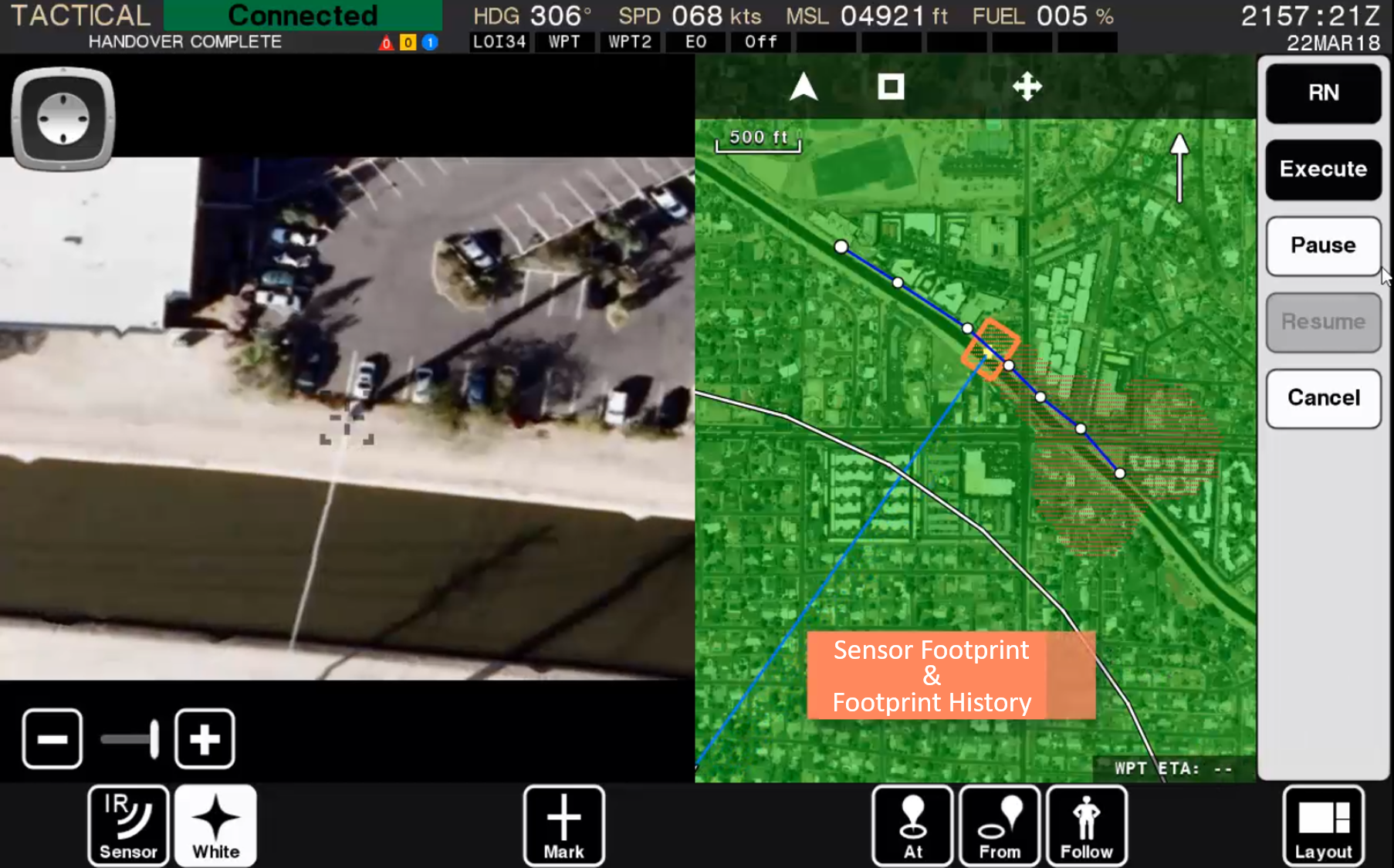
Kutta utilizes a very efficient, lightweight MPEG hardware encoder to digitize MPEG 1, 2, or 4 video and display in real-time. Our recorded MPEG data contains time-stamped and embedded uncrewed vehicle parameters such as the vehicle’s position and payload gimbal position for improved video analysis and playback. When used in conjunction with Kutta’s sensor footprint, the video review mode provides the ability to visualize the vehicle’s location and the payload pointing position relative to the real-time video for improved geo-referenced situational awareness.