The Mission Planner (MP) uses the Department of Defense (DOD) UAS, Control Segment Working Group (UCS-WG), and Service Oriented Architecture (SOA) with open interfaces to enable integration into Intelligence, Surveillance, and Reconnaissance (ISR)-enabled platforms. Our system was specifically designed to automate many of the manual mission planning tasks associated with ISR flight operations.
ISR MISSION PLANNER
The Mission Planner (MP) uses the Department of Defense (DOD) UAS, Control Segment Working Group (UCS-WG), and Service Oriented Architecture (SOA) with open interfaces to enable integration into Intelligence, Surveillance, and Reconnaissance (ISR)-enabled platforms. Our system was specifically designed to automate many of the manual mission planning tasks associated with ISR flight operations.
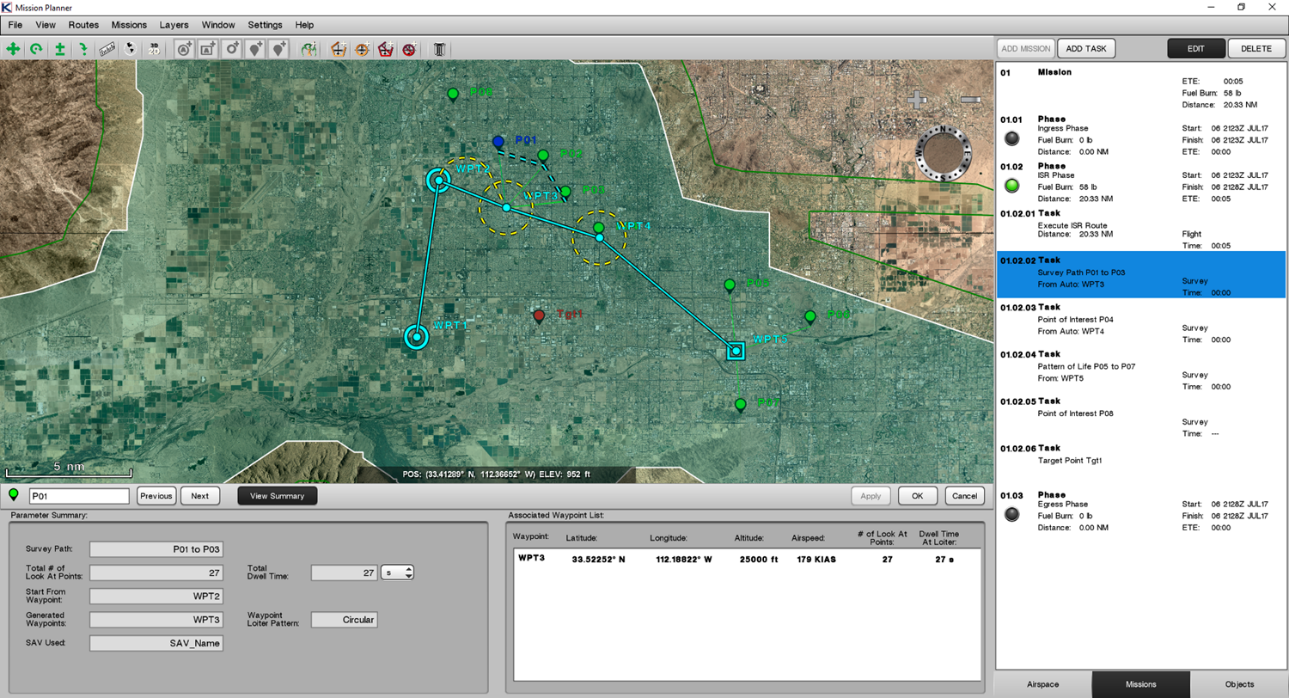
Task Defining
Quickly defines high-level tasks such as ingress routes, roads and areas to survey, and target points to cycle through while conducting “Pattern of Life” surveillance, loiter and rally points, as well as egress routes. Directional reconnaissance points, pre-defined points of interest, and sensor survey routes can also be entered. The MP will automatically calculate the optimal stand-off loiter points for the air vehicle in conjunction with the optimal sensor stare points, with dwell times and coverage overlap to successfully survey the route or area while maintaining the chosen zoom level.
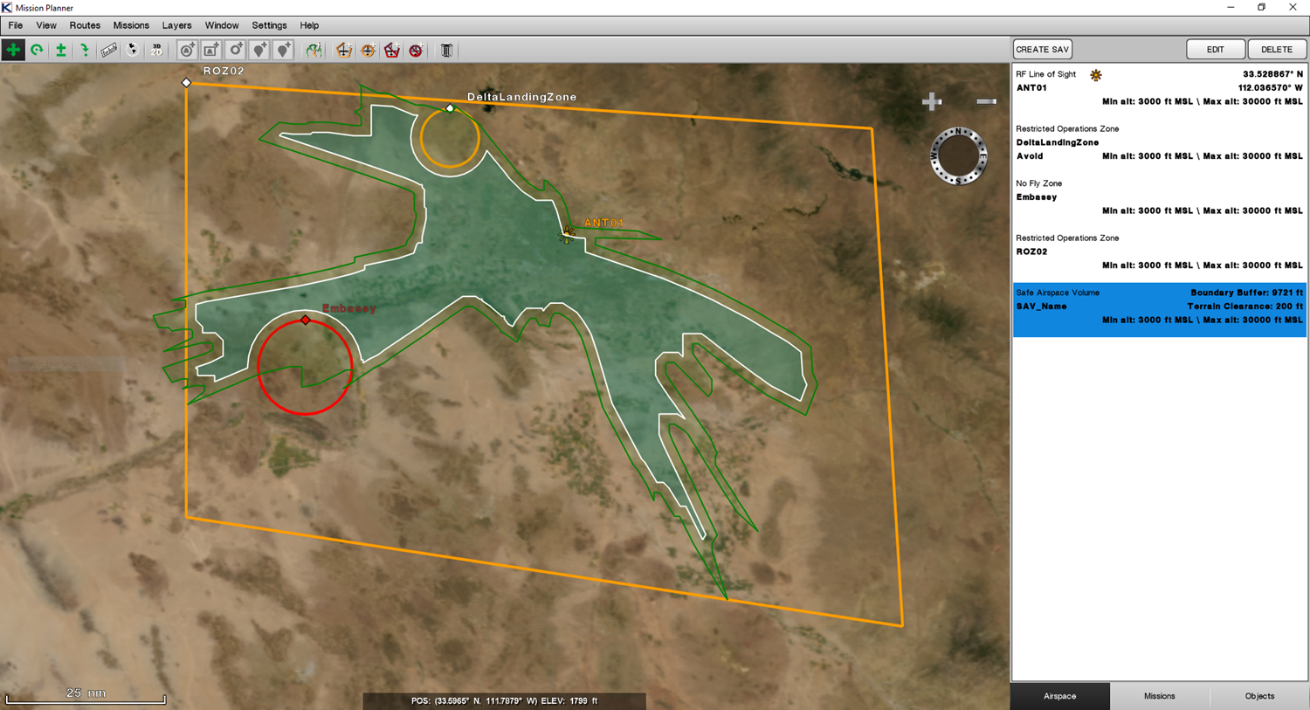
Line-of-Sight / Airspace Regions
Analyzes the line-of-sight range of ground-based radio signals to coordinate efforts between the Fixed Ground Station (FGS) and Transportable Ground Station (TGS) during a mission.
Inputs and studies existing battlespace airspace regions (e.g. restricted operating zones, no-fly zones, etc.) along with their attributes such as the altitude region of controlled airspace, the time frame that it is valid and the controlling authorities of the airspace (e.g. frequencies required to contact the official managing the airspace).
Auto-Routing
Auto-routes around no-fly zones, computes mission times, and ties the high-level ISR objectives (i.e. ingress, surveillance, and egress) together to create a complete and efficient mission plan (e.g. flight routes with estimated waypoint arrival times and total mission time) to maximize time on target.
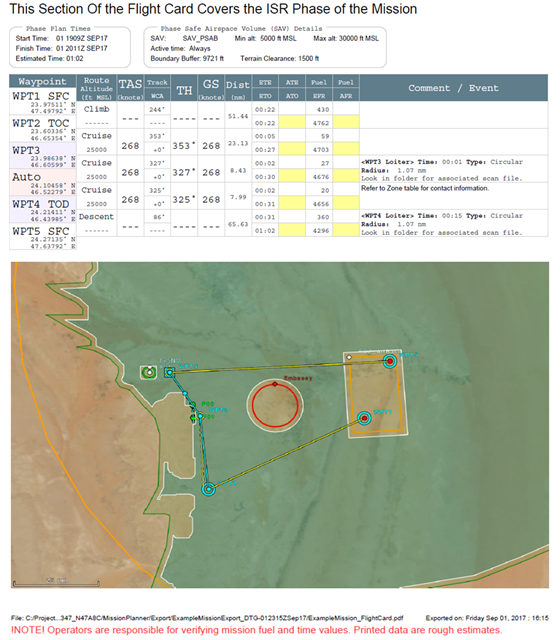
Flight-Test Cards
Outputs easily readable flight-test cards for pilots to utilize during the mission. The MP also outputs a digital file for visual reference so that onboard systems can utilize the data, enable the correct sensors, and point the full motion video camera at the desired targets to fulfill the mission objectives.
Mission Planner Output Features:
• An easily readable flight-test card in PDF format for the pilot to utilize during the mission • A digital file for visual reference so that onboard systems can utilize the planned data
Mission Planner Active Mission Features:
• Indicate the geographical position of the aircraft overlaid on a map
• Display the location and sensor footprint of where the EO/IR sensor is focused on the ground
Flight-Test Cards
Outputs easily readable flight-test cards for pilots to utilize during the mission. The MP also outputs a digital file for visual reference so that onboard systems can utilize the data, enable the correct sensors, and point the full motion video camera at the desired targets to fulfill the mission objectives.
Mission Planner Output Features:
• An easily readable flight-test card in PDF format for the pilot to utilize during the mission • A digital file for visual reference so that onboard systems can utilize the planned data
Mission Planner Active Mission Features:
• Indicate the geographical position of the aircraft overlaid on a map
• Display the location and sensor footprint of where the EO/IR sensor is focused on the ground