Kutta’s UVT is the next generation of Remote Video Terminal (RVT) technology for uncrewed system and manned ISR platforms. The UVT is capable of adapting and changing the Level of Interoperability (LOI) available to match the asset’s functionality and the operator’s needs. It also scales across display devices running on Windows™, Android™, or Linux™. The Commercial-Off-The-Shelf (COTS) variant UVT runs on a variety of hardware platforms, and it can be installed on existing computing devices.
High-Level Overview of STANAG 4586 LOI for Electrical Optical / Infrared Payloads
Level 1: Indirect receipt of payload data
Level 2: Direct receipt of payload data and in communication with the UAV
Level 3: Direct receipt of payload data and control of payload (e.g. pan, tilt, zoom)
Level 4: Direct receipt of payload data, control of payload, and control of air vehicle (e.g. waypoints and airspeed)
Level 5: Direct receipt of payload data, control of payload, control of air vehicle, take-off and land
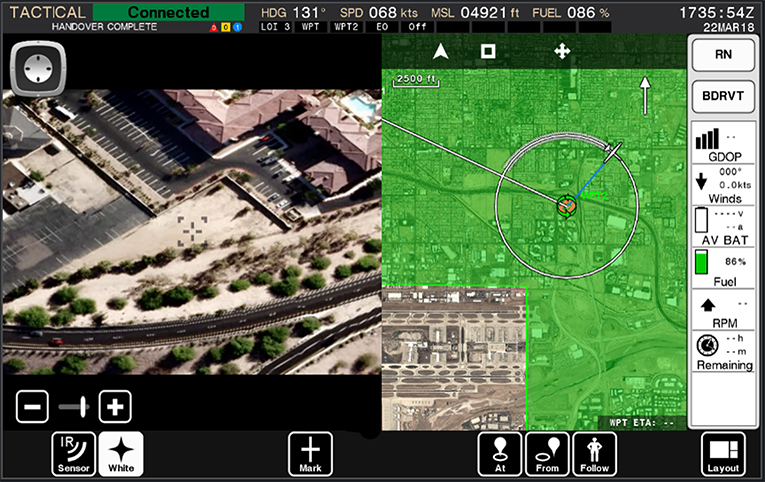
Stare-At
This feature allows a user to simply point-and-click on a map to direct the uncrewed system. The autonomous auto-router generates a safe and reliable multi-waypoint mission plan, avoiding terrain, as well as known no-fly zones, while ensuring the uncrewed vehicle stays within the controller’s radio frequency line-of-sight (i.e. prevents lost link).
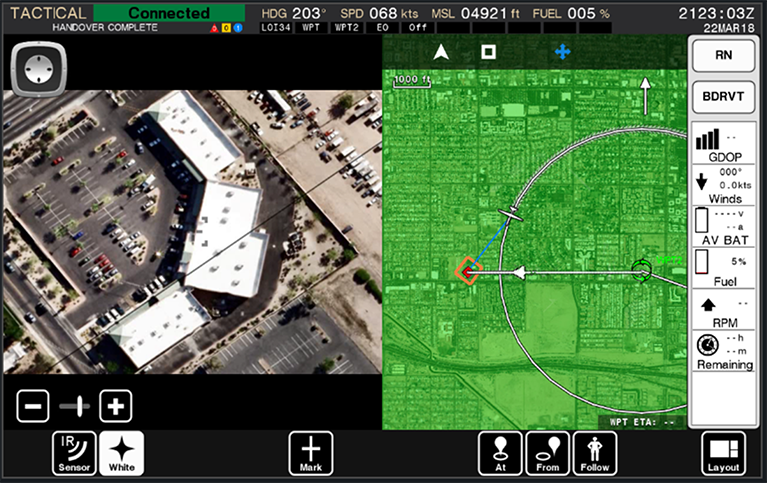
Stare-From
This feature allows users to simply point, click, and drag to define the directional reconnaissance needed on an objective. It also allows the operator to keep the UAS payload focused on the side of a mountain or building. The autonomous auto-router generates a safe and reliable multi-waypoint mission plan, avoiding terrain, as well as known no-fly zones, while ensuring the uncrewed vehicle stays within the controller’s radio frequency line-of-sight (i.e., prevents lost link).
Follow-and-Track
This feature allows the operator to engage an autonomous follow-and-track mode while the uncrewed system constantly utilizes the auto-router to avoid terrain, as well as known no-fly zones, staying within the controller’s radio frequency line-of-sight.
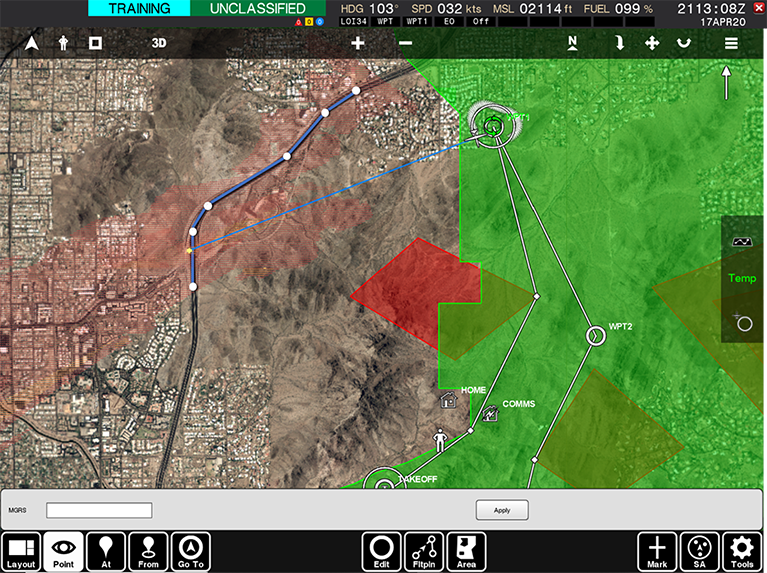
Route and Area Survey
This feature allows a user to simply place points along a route or define an area to be surveyed. The user can also define the imagery resolution by utilizing a basic National Imagery Interpretability Rating Scale (NIIRS). The advanced planning algorithm determines a multi-waypoint flight plan and autonomously sequences the payload to ensure the video is captured at the required resolution.
Auto-Routing
The autonomous auto-router feature is designed to be air vehicle-independent. The auto-router works in conjunction with all the features above to generate safe and reliable multi-waypoint mission plans to avoid terrain, as well as known no-fly zones, while ensuring the uncrewed vehicle stays within the controller’s radio frequency line-of-sight.